AUTHOREA
Log in
Sign Up
Browse Preprints
LOG IN
SIGN UP
Carlos Graciós
Full Time Research Professor
Genèva, CH
Member of:
European Organization for Nuclear Research (CERN)
Public Documents
1
October 16, 2018
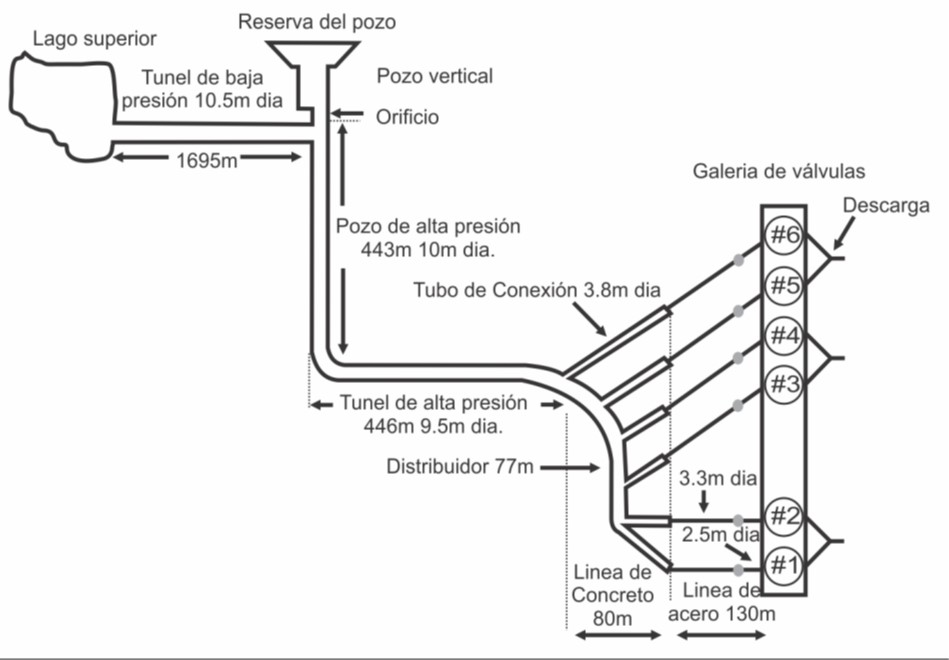
Alternative method for modelling structural and functional behaviour of a Storage Hyd...
Carlos Graciós, Rosa María , German Ardul Munoz-Hernandez, et al.